Nell'automazione di macchina la movimentazione dei prodotti è una fase fondamentale della catena di processo, in particolare se si tratta di operazioni di caricamento e scarico in uno spazio multidimensionale che influiscono direttamente sul tempo ciclo della macchina. Un profilo di moto veloce, preciso e adeguato sia rispetto al prodotto da gestire che alla macchina, assicura efficienza e un risparmio di tempi e costi.
Controllo del percorso, movimentazione e cinematica
– avviare i robot in maniera immediata e intuitiva
È difficile immaginare l'ingegneria dell'automazione, in particolare l'automazione di macchina, senza i robot. Noi di SEW-EURODRIVE offriamo un portfolio completo per l'implementazione di soluzioni di robotica specifiche per le diverse applicazioni e requisiti.
Clicca sui bollini numerati nell'immagine per scoprire di più:

- Eseguiti sul controllore
- Gestiscono i convertitori di frequenza
- Sono particolarmente semplici da avviare, precisi e affidabili
- Ampio portfolio per un'automazione completa
- Dai controllori di movimento ai controllori ad alte prestazioni
- In diversi modelli
- In una rete DC link con flusso di energia ottimale
- Flessibili sotto ogni aspetto
- Con MOVIDRIVE® modular e Power and Energy Solutions
Da anni, i nostri motori e riduttori sono famosi per l'alta qualità e la resistenza meccanica.
Il nostro sistema modulare ha molto da offrire anche per i robot.
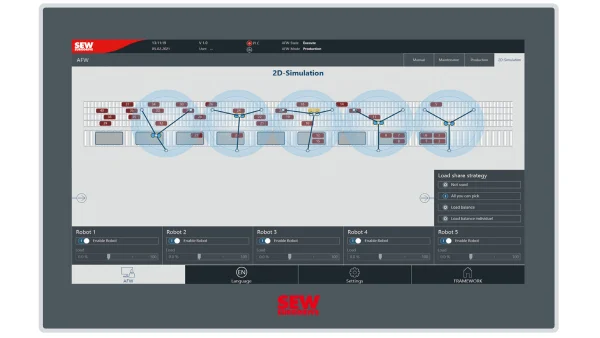
- Display con controller e tastiere integrati
- WebVisu per l'utilizzo con dispositivi esterni
- Template completi
RobotMonitor è l'interfaccia tra il robot e l'uomo. In questo modo l'operatore ha il pieno controllo del sistema.
Servizi di assistenza a 360° per l'intero ciclo di vita del sistema completano il nostro portfolio.
- La tecnologia di azionamento trasforma l'energia elettrica in movimento dinamico.
- I servomotori sincroni della serie CM3C.. e i servoriduttori epicicloidali della serie PxG® sono i componenti ideali per ottenere le migliori performance.
Dinamicità, precisione e affidabilità
Le applicazioni tipiche delle nostre soluzioni di robotica comprendono il pick and place, la pallettizzazione e l'impilamento, il trasporto e il trasferimento e l'imballaggio. Le nostre soluzioni di robotica sono ideali anche per i processi di finitura dei prodotti, come il decoro di prodotti alimentari e la lavorazione al volo.
Oltre a soddisfare elevati requisiti di dinamica, la manipolazione dei prodotti deve essere estremamente delicata e accurata. Inoltre, il processo per essere stabile richiede che il materiale sia lavorato con un'elevata precisione e in condizioni riproducibili.
I moduli software MOVIKIT® Robotics sono stati sviluppati proprio a questo scopo. Inoltre, dal punto di vista hardware, è disponibile il nostro kit cinematico per robot a braccio parallelo, che consente di implementare sistemi con sequenze di movimento rapide e complesse. Insieme formano la combinazione ideale per implementare movimenti interpolati con la stessa semplicità ed efficacia del controllo di un asse singolo.
Software MOVIKIT® Robotics e gli add-on
Nessun linguaggio di programmazione complesso – direttamente sulla macchina – assolutamente intuitivo
MOVIKIT® Robotics è il software SEW-EURODRIVE per il controllo di robot dotato di un'ampia gamma di modelli cinematici parametrizzabili. Le ampie funzionalità del software standard possono essere ampliate grazie a numerosi moduli aggiuntivi programmabili, che offrono funzioni specifiche e dedicate.
-
 MOVIKIT® Robotics
MOVIKIT® Robotics
-
 MediumModels add-on
MediumModels add-on
-
 LargeModels add-on
LargeModels add-on
-
 ConveyorTracking add-on
ConveyorTracking add-on
-
 Touchprobe add-on
Touchprobe add-on
-
 Circle add-on*
Circle add-on*
-
 CollisionDetection add-on
CollisionDetection add-on
MOVIKIT® Robotics


Il modulo software parametrizzabile MOVIKIT® Robotics, insieme alla simulazione 3D integrata e all'opzione Teach-in (autoapprendimento), garantisce una creazione semplicissima delle sequenze di movimento. Allo stesso tempo, il modulo offre un'ampia gamma di funzioni e un elevato grado di flessibilità per l'implementazione della specifica applicazione.
Le caratteristiche e i vantaggi di MOVIKIT® Robotics possono essere consultati nella pagina dedicata ai moduli software MOVIKIT®.
MediumModels add-on

Il modulo MediumModels amplia le funzionalità per includere modelli cinematici con tre o quattro assi articolati, ad esempio robot a portale, a portale a rulli, SCARA, delta, tripodi e quadripodi.
Inoltre, il modulo MediumModels include anche i modelli 3D corrispondenti ai modelli cinematici in MOVISUITE® RobotMonitor e assicura una semplice parametrizzazione dei modelli in MOVISUITE®.
LargeModels add-on

Il modulo LargeModels amplia le funzionalità aggiungendo modelli cinematici con cinque o sei assi articolati o almeno due gradi di libertà orientativi, anche per robot a portale, robot a braccio articolato, tripodi ed esapodi.
Inoltre, il modulo LargeModels include anche i modelli 3D corrispondenti ai modelli cinematici in MOVISUITE® RobotMonitor e assicura una semplice parametrizzazione dei modelli in MOVISUITE®.
ConveyorTracking add-on
Il modulo aggiuntivo ConveyorTracking amplia le funzioni di MOVIKIT® Robotics aggiungendo l'opzione di interpolazione in sistemi di coordinate mobili. In questo modo è possibile, ad esempio, prelevare oggetti da un nastro trasportatore in movimento e posizionarli in un contesto statico o su un altro nastro trasportatore. Il robot si sincronizza innanzitutto con il nastro nel sistema di coordinate cartesiane. Tutti gli altri movimenti vengono quindi sincronizzati con il nastro in movimento, rendendo possibile l'esecuzione della procedura di prelievo.
Il modulo aggiuntivo supporta anche il prelievo e il posizionamento di oggetti da o su una tavola rotante. La tavola rotante può essere controllata da un sistema esterno. In alternativa, la tavola rotante può essere controllata in modo sincrono dal robot, così da ampliare i gradi di libertà del robot. Il risultato è che un robot con tre gradi di libertà può eseguire, ad esempio, un compito di pallettizzazione a quattro dimensioni.
Touchprobe add-on
Il modulo Touchprobe consente di effettuare una misurazione precisa della posizione cartesiana corrente o del posizionamento reale basato su sensori.
Quando viene attivato un sensore o cambia lo stato di una variabile booleana nel programma del robot, la posizione effettiva del robot sul suo percorso viene identificata in termini di sistema cartesiano. È quindi possibile eseguire un'azione definita.
Tale azione definita può essere, ad esempio, il posizionamento basato su un sensore. Si tratta di percorrere una distanza residua specifica a partire dal punto misurato sul percorso programmato del robot.
Le applicazioni per la funzione Touchprobe includono la pallettizzazione o la depallettizzazione in cui l'altezza dei pezzi è variabile o sconosciuta e l'esecuzione di operazioni basate su sensori.
Panoramica delle funzioni:
- Funzioni del sistema di tastatura: Misurazione e posizionamento basato su sensore
- Registrazione e deregistrazione della funzione Touchprobe in qualsiasi punto della sequenza del percorso
- Registrazioni multiple in un programma del robot
- Parametrizzazione della sorgente dell'evento, del contorno, della ripetizione degli eventi (ad es. più misure) e della direzione di misura
- Ampia diagnostica attraverso la registrazione, l'attivazione del trigger e la posizione del tastatore nel programma del robot e sulla base della simulazione 3D
Circle add-on*
Il modulo aggiuntivo Circle amplia la gamma di funzioni di MOVIKIT® Robotics aggiungendo l'opzione di interpolazione circolare.
I segmenti circolari possono essere parametrizzati in vari modi.
- Centro e angolo del cerchio
- Centro del cerchio e punto finale del segmento circolare
- Punto intermedio del segmento circolare e punto finale del segmento circolare
- Raggio e angolo
- Raggio e punto finale del segmento circolare
*In preparazione
CollisionDetection add-on
L'utilizzo del modulo aggiuntivo CollisionDetection consente di evitare l'utilizzo di costosi sensori sull'utensile o sui giunti del braccio. Questo modulo aggiuntivo consente infatti di identificare in modo affidabile qualsiasi collisione sull'utensile e sulle altre parti meccaniche del robot. Ciò è possibile grazie al confronto continuo tra lo stato effettivo del robot e lo stato previsto da un modello dinamico.
Le risposte alle collisioni, come l'arresto di emergenza true-to-path, possono essere configurate in anticipo o integrate direttamente nel programma di movimento mediante comandi parametrizzabili.
Dr. Markus Müller, Application Software MOVIKIT® Robotics
Quello che per noi è standard, per altri è custom
"Che si tratti di robotica SCARA, a portale, a braccio articolato o delta, progettiamo soluzioni personalizzate per un'ampia gamma di modelli cinematici, grazie al nostro portfolio di prodotti standard. Queste innovative soluzioni di azionamento e automazione sono impiegate in pressoché tutti i settori e le aree di applicazione, in tutto il mondo, dal settore del packaging, all'automotive, alla produzione di materiali e all'industria metallurgica, fino al food & beverage."